Relightable object acquisition is a key challenge in simplifying digital asset creation.
Complete reconstruction of an object typically requires capturing hundreds to thousands of photographs
under controlled illumination, with specialized equipment.
The recent progress in differentiable rendering improved the quality and accessibility of inverse
rendering optimization.
Nevertheless, under uncontrolled illumination and unstructured viewpoints, there is no guarantee that the
observations contain enough information to reconstruct the appearance properties of the captured object.
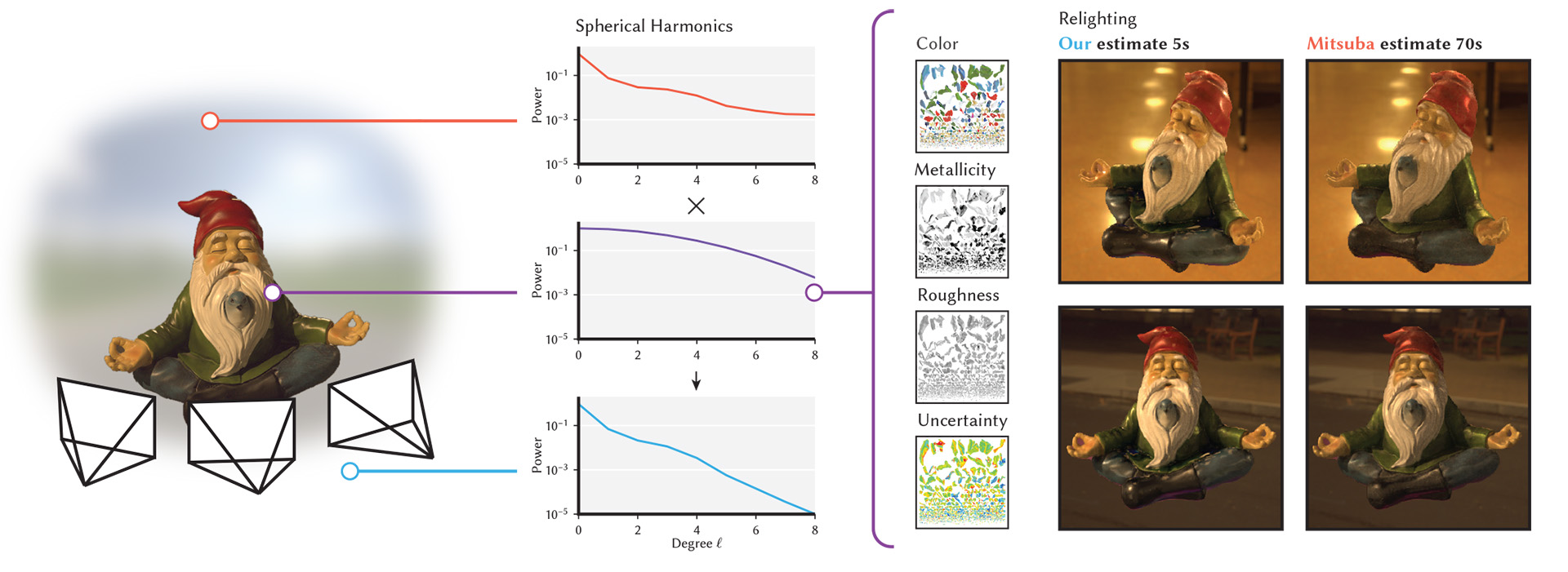
We thus propose to consider the acquisition process from a signal-processing perspective.
Given an object's geometry and a lighting environment, we estimate the properties of the materials on the
object's surface in seconds.
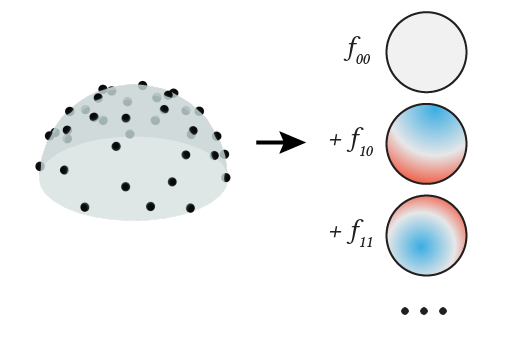
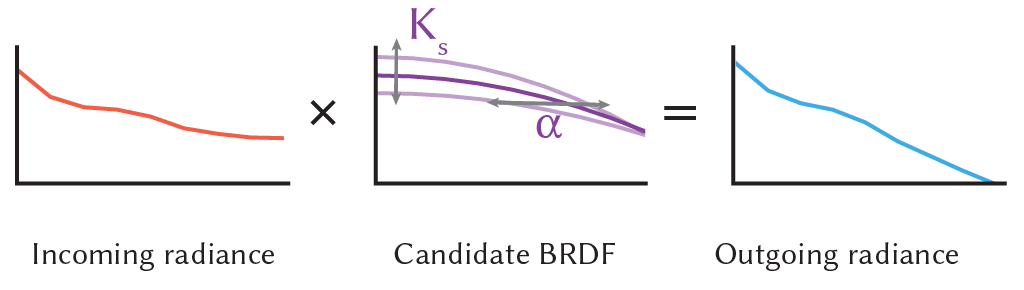
We do so by leveraging frequency domain analysis, considering the recovery of material properties as a
deconvolution, enabling fast error estimation.
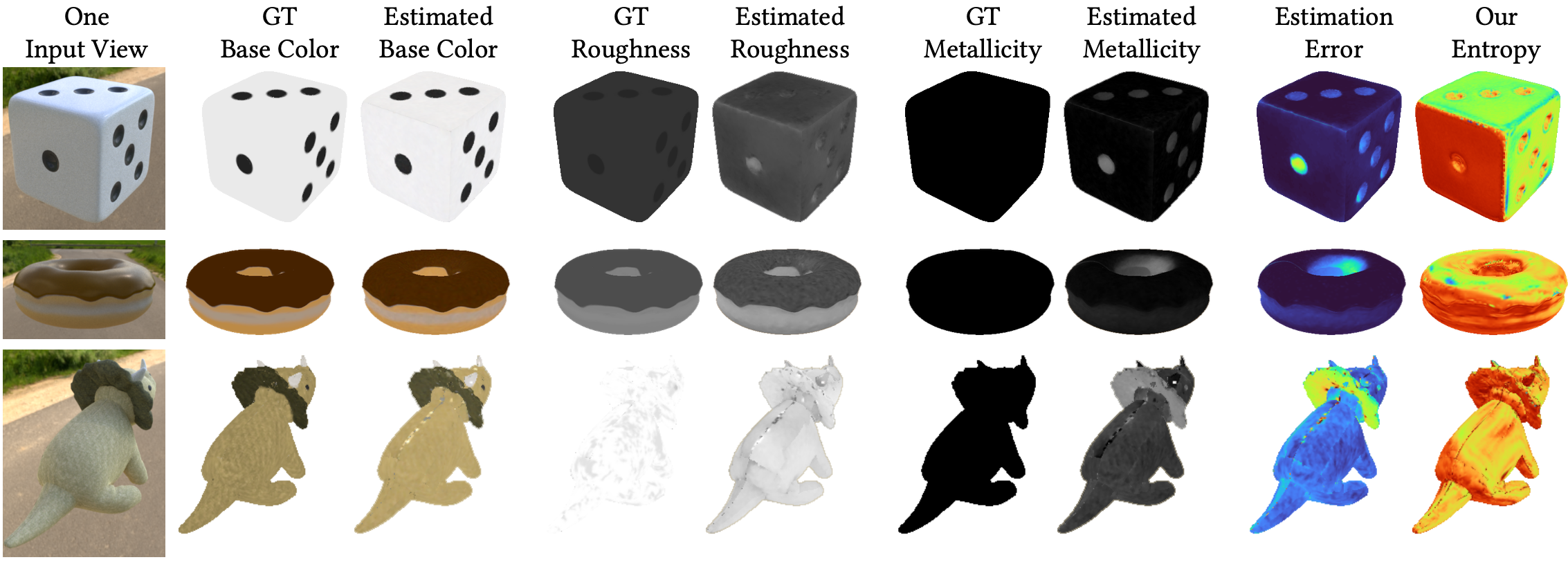
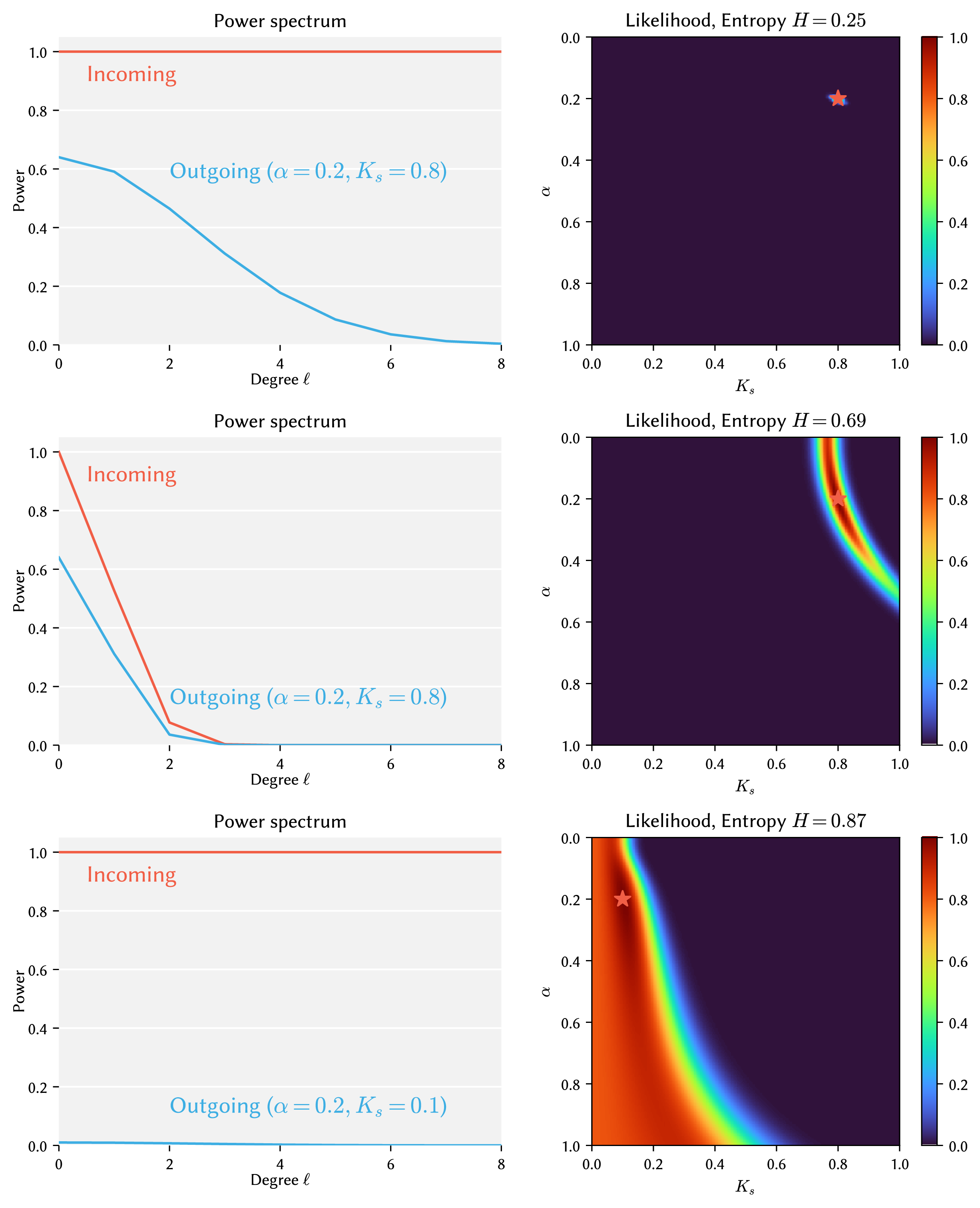
We then quantify the uncertainty of the estimation, based on the available data, highlighting the areas
for which priors or additional samples would be required for improved acquisition quality.
We compare our approach to previous work and quantitatively evaluate our results, showing similar quality
as previous work in a fraction of the time, and providing key information about the certainty of the
results.